Academic Work
Diploma Thesis / Diplomarbeit
Development of a jumping robot using soft pneumatic actuators
Department of Mechanical and Aerospace Engineering, Hong Kong University of Science and Technology; Institute for Anthropomatics, Karlsruhe Institute of Technology
Soft robotics is an emerging field of novel mechanical designs that create compliant and tolerant structures out of flexible materials, attempting to reduce the complexity of both their hardware and software to compensate for or eliminate some of the constraints set by traditional ’hard’ robots such as low adaptability or high complexity. At the same time, jumping is a very interesting method of locomotion, with the animal kingdom providing myriads of very diverse and successful examples. The study of jumping or hopping robots could prove extremely useful in situations such as rough terrain, high obstacles and other complex environments.
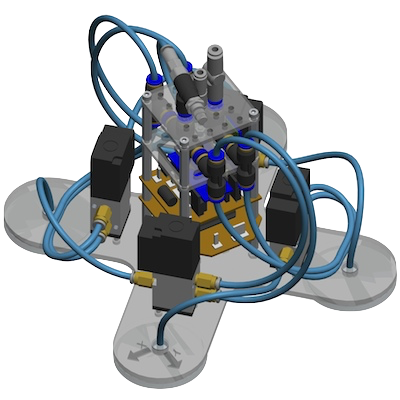
The goal of this project is to develop a mobile robot platform capable of jumping locomotion using soft, silcone elastomer based pneumatic actuators as legs that accelerate the platform upwards by expanding rapidly upon applying internal air pressure. The robot is able to control the direction of the jump by altering the timing patterns in which the individual legs are activated. It is equipped with on-board electronics that allow controlling and logging the jumping performance.
After providing an overview on the existing research on jumping robots, fluidic actuation and soft robotics, the actuators themselves are designed, tested and their static and dynamic behavior characterized. Then, the robot platform is developed, including the structural design, the pneumatic system, the electronics and the control software. A protocol is implemented to allow wireless communication between the robot and a PC. A tetherless version with on-board electrical and pneumatic supply is also presented. Afterwards, several experiments are conducted to evaluate and improve the jumping performance with regards to height, distance and direction, and the insights gained are compiled to gauge the usefulness of such robotic systems. Furthermore, challenges encountered and pointers for further research are outlined.
Student Research Project / Studienarbeit
Development of a scale model automatic storage and retrieval machine based on the principle of the inverted pendulum
Institute for Material Handling and Logistics, Karlsruhe Institute of Technology
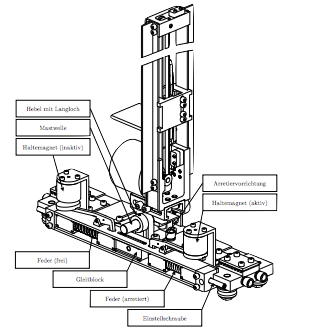
In order to study a new concept for the design of an automatic storage and retrieval machine (AS/RS) for use in high-rise warehouses, a scale model of such an AS/RS is to be developed and built. In addition to the linear degrees of freedom in the x and y directions, the mast of the machine is to be equipped with a rotational DOF around the z axis. This would allow the device to operate similarly to an inverted pendulum, with a state controller keeping the balance.
After creating a mathematical model of the system, its properties are to be chosen such as to mimic the oscillation properties of a real machine. To achieve the correct dynamics, appropriate drive motors have to be chosen and a feedback system has to be selected.
Based on these calculations, a full CAD model is to be created using the ProEngineer software, and then machined using shop drawings derived from this model. The device must provide the option to control it using a fixed mast setup, as well as the inverted pendulum mode. Additionally, the possibility of simulating the oscillation properties of a real AS/RS should be provided using a system of springs and dampers. The means to actively tilt the mast using a dedicated actuator are also to be provided. In case of failure (such as a power outage or an error in the control software), a set of safety measures are to bring the system back into a stable state.
This paper should serve as a base to determine whether a system with all the aforementioned capabilities is feasible, and whether such a system could have potential advantages versus traditional devices, especially with regard to access times, and whether this system could eventually be deployed in an industrial setting.